行星减速机是一种用途广泛的工业产品,该减速机体积小、重量轻,承载能力高,常规使用的寿命长、运转平稳,噪声低。具有功率分流、多齿啮合独用的特性。最大输入功率可达104kW。适用于起重运输、工程机械、冶金、矿山、石油化学工业、建筑机械、轻工纺织、医疗器械、仪器仪表、汽车、船舶、兵器和航空航天等工业部门行星系列新品种WGN定轴传动减速器、WN子母齿轮传动减速器、弹性均载少齿差减速器。
行星减速机是一种具有广泛通用性的新性减速机,内部齿轮采用20CvMnT渗碳淬火和磨齿。整机具有结构尺寸小,输出扭矩大,速比在、效率高、性能安全可靠等特点。
相关概念级数:行星齿轮的套数.由于一套星星齿轮不足以满足较大的传动比,有时需要2套或者3套来满足拥护较大的传动比的要求.由于增加了星星齿轮的数量,所以2级或3级减速机的长度会有所增加,效率会有所下降.
回程间隙:将输出端固定,输入端顺时针和逆时针方向旋转,使输入端产生额定扭矩+-2%扭矩时,减速机输入端有一个微小的角位移,此角位移就是回程间隙.单位是分,就是一度的六十分之一,也有人称之为背隙。行星减速机结构
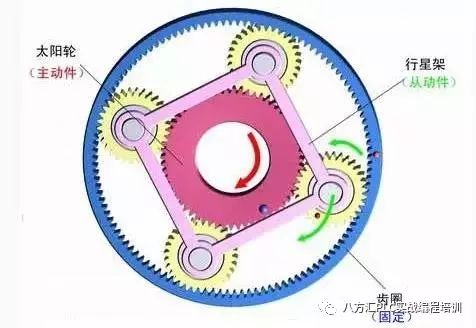
行星减速机主要传动结构为:行星轮,太阳轮,外齿圈.行星减速机因为结构原因,单级减速最小为3,最大一般不超过10,常见减速比为:3.4.5.6.8.10,减速机级数一般不超过3,但有部分大减速比定制减速机有4级减速.下面是几款行星减速机的结构图!


1)齿圈固定,太阳轮主动,行星架被动。从图例1中能够准确的看出,此种组合为降速传动,通常传动比一般为2.5~5,转向相同。
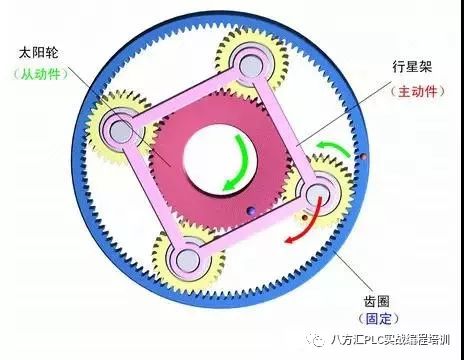
2)齿圈固定,行星架主动,太阳轮被动。从图例2中能够准确的看出,此种组合为升速传动,传动比一般为0.2~0.4,转向相同。
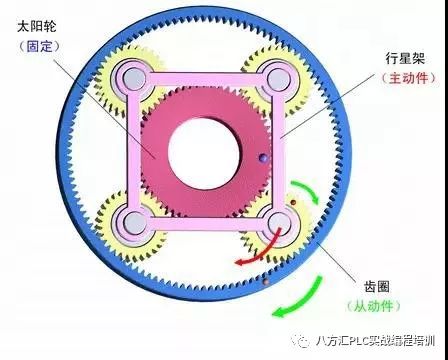
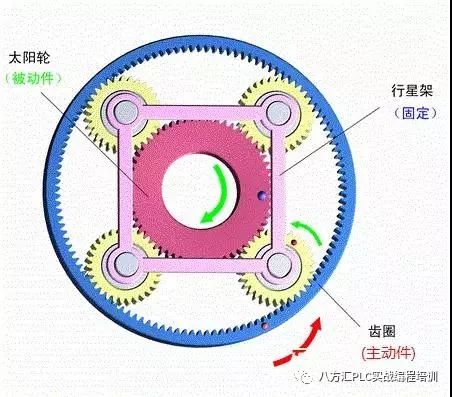
3)太阳轮固定,齿圈主动,行星架被动。从图例3中能够准确的看出,此种组合为降速传动,传动比一般为1.25~1.67,转向相同。

从演示中能够准确的看出,此种组合为升速传动,传动比一般为0.6~0.8,转向相同。
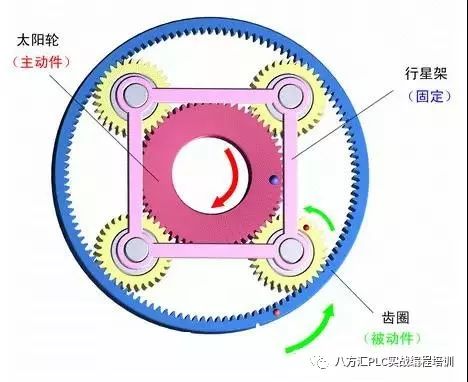
5)行星架固定,太阳轮主动,齿圈被动。从演示中能够准确的看出此种组合为降速传动,传动比一般为1.5~4,转向相反。
从演示中能够准确的看出此种组合为升速传动,传动比一般为0.25~0.67, 转向相反。
当把行星架和齿圈结合为一体作为主动件,太阳轮为被动件或者把太阳轮和行星架结合为一体作为主动件,齿圈作为被动件的运动情况。该组合行星齿轮间没有相对运动,作为一个整体运转,传动比为1,转向相同。汽车上常用此种组合方式组成直接档。
8)三元件中任一元件为主动,其余的两元件自由:从分析中可知,其余两元件无确定的转速输出。第六种组合方式, 由于升速较大,主被动件的转向相反,在汽车上通常不用这种组合。
现代工业设施应用中在高精度应用场合随着伺服电机技术的发展,从高扭矩密度乃至于高功率密度,使转速的提升高过3000rpm,由于转速的提升,使得伺服电机的功率密度大幅度的提高。这意谓着伺服电机要不要搭配减速机,其决定因素主要是从应用的需求上及成本的考虑来审视。例如,以下应用场合必须搭配伺服行星减速机。
1、重负荷高精度必须对负载做移动并要求精密定位时便有此需要。一般像是航空、卫星、医疗、军事科技、晶圆设备、机器人等自动化设备。他们的共同特征是将负载移动所需的扭矩往往远超过伺服电机本身的扭矩容量。而透过减速机来做伺服电机输出扭矩的提升,便可有效解决这一个问题。
2、提升扭矩输出扭矩提升的方式,可能采用直接增大伺服电机的输出扭矩方式,但这样的形式不但一定要使用昂贵大功率的伺服电机,电机还要有更强壮的结构,扭矩的增大正比于控制电流的增大,此时采取了比较大的驱动器,功率电子组件和相关机电设施规格的增大,又会使控制管理系统的成本大幅增加。
3、提高使用性能据了解,负载惯量的不当匹配,是伺服控制不稳定的最大原因之一。对于大的负载惯量,可通过减速比的平方反比来调配最佳的等效负载惯量,以获得最佳的控制响应。所以从这个方面来看,行星减速机为伺服应用的控制响应的最佳匹配。4、降低设备成本从成本观点,假设0.4KW的AC伺服电机搭配驱动器,需耗费一单位设备成本,以5KW的AC伺服电机搭配伺服驱动器必须耗费15单位成本,但是若采用0.4KW伺服电机与驱动器,搭配一组减速机就能达到前述耗费15个单位成本才能完成的事,在操作成本上节省50%以上。
因此,使用者可依其加工需求不同,决定选用不同安装形式的行星减速机产品。一般而言,在机台运转上有低速、高扭矩、高功率密度场合需求,绝大部分采用行星减速机。
三相交流伺服电机应用广泛,但经过长时间运行后,会发生各种故障。及时判断故障原因,进行相应处理,是防止故障扩大,保证设备正常运行的一项重要工作。 01 电机编码器报警 01 故障原因 ①接线错误; ②电磁干扰; ③机械振动导致的编码器硬件损坏; ④现场环境导致的污染; 02 故障排除 ①检查接线并排除错误; ②检查屏蔽是不是到位,检查布线是不是合理并解决,必要时增加滤波器加以改善; ③检查机械结构,并加以改进; ④检查编码器内部是否受到污染、腐蚀(粉尘、油污等),加强防护; 03 安装及接线标准 ①尽量使用原装电缆; ②分离电缆使其尽量远离污染接线,特别是高污染接线; ③尽可能始终使用内部电源。若使用开关电源,则
变频电机和伺服电机是现代工业领域中常用的两种电动机类型。虽然它们都能轻松实现电动机的运转,但在设计原理、控制方式和应用场景范围等方面存在许多区别。本文将从这样一些方面进行详尽、详实且细致的比较分析。 一、设计原理: 变频电机采用了变频器来控制,通过改变电源频率和电压来实现控制电机的转速。而伺服电机则需要配备伺服系统,通过传感器和反馈回路来控制电机的位置和速度。 二、控制方式: 变频电机的控制方式相对简单,只一定要通过变频器调整电源的频率和电压就可以实现对电机转速的控制。而伺服电机的控制则更为复杂,需要通过伺服系统对位置和速度进行反馈和控制,以实现高精度的运动控制。 三、应用场景范围: 由于变频电机的控制方式相对简单,所以它通常适用于一些对转速要
伺服电机(servo motor )是指在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置。 伺服电机非常准确地控制速度和位置,可以将电压信号转化为转矩和转速以驱动控制对象。伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,且具有机电时间常数小、线性度高、始动电压等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和交流伺服电动机两大类,其主要特征是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。 工作原理 伺服系统(servo mechanism)是使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。伺服
的选型比较 /
在哪几种情况下会造成伺服电机抖动?怎么样才可以解决这些伺服电机抖动带来的问题?分别是如何来解决的? 例如:加减速时间设置得过小,伺服电机在突然的启动或者停止的时候会产生高惯性抖动......分别把加减速时间调大能解决这个问题。 下面精选整理网友对伺服电机抖动原因进行的分析,供大家探索借鉴: 壹 观点一 当伺服电机在零速时发生抖动,应该是增益设高了,可减小增益值。如果启动时抖动一下即报警停车了,最大可能是电机相序不正确。 贰 观点二 1、PID增益调节过大的时候,会造成电机抖动,特别是加上D后,尤其严重,所以尽量加大P,减少I,建议还是不要加D。 2、编码器接线接错的情况下也会出现抖动。 3、负载惯量过大,更换更大的电机和驱
抖动带来的问题 /
本文以32位变频用 MCU V850E/IX3 UPD70F3454为例,阐述其在交流伺服系统中的应用。伺服机在伺服系统中控制机械元件运转的发动机。是一种补助马达间接变速装置。伺服电机,可使控制速度,位置精度非常准确。将电压信号转化为转矩和转速以驱动控制对象。 关于瑞萨电子UPD70F3454 UPD70F3454是瑞萨电子开发的用于变频控制的32位高性能MCU,使用V850核、RISC架构、5级流水线、内置DSP功能、最大64MHZ,内置256K FLASH ROM及相关外围功能,例如DMA控制器,定时器/计数器,串行接口UART、SPI、IIC,A/D,总线控制器,低压检测,片上调试等。针对变频控制,UPD7
中32位MCU的应用 /
步进电机自动控制系统不仅在理论上快速的提升,在其应用器件上也日新月异。模块化、数字化、高精度、长寿命的器件每隔3~5年就有更新换代的产品面市。传统的交流伺服电机特性软,并且其输出特性不是伺服电机单值的;步进电机一般为开环控制而无法准确定位,电动机本身还有速度谐振区,pwm调速系统对位置跟踪性能较差,变频调速较简单但精度有时不够,直流电机伺服系统以其优良的性能被广泛的应用于位置随动系统中,但其也有缺点,例如结构较为复杂,在超低速时死区矛盾突出,并且换向刷会带来噪声和维护保养问题。目前,新型的永磁交流伺服电机发展迅速,尤其是从方波控制发展到正弦波控制后,系统性能更好,它调速范围宽,尤其是低速性能优越。 交直流伺服电机系统
说起对工业机器人的性能要求,无非就是“快、准、狠”三字。其实这也就是对机器人关节伺服电机的要求,今天我们就来拆解一下这三字背后的含义。 其中“快”、“准”的意思大家都非常好了解,就是要求伺服电机的响应速度要快,控制精度要高。而“狠”字又怎么解呢?其实大家仔细想想,伺服电机除了又快又准外,我们对它的余下要求就是过载能力强,即“狠”了。 1.1为什么伺服电机要求过载能力强? 由于伺服电机在机器人上大多数都用在驱动关节的运动,因此它有必要进行频繁正反转短时运行。而在这种频繁正反转,而且又带着一定惯量的负载,还要求控制速度很快的情况下,对伺服电机的过载能力(过载扭矩、过载电流)要求是非常高的。 由上述公式可知,实际伺服
伺服电机使用的是三相同步电机,其特点是转子: 没有三相异步电机中的鼠笼条;转子上有很多贴片,是永磁铁(钕铁硼)材料。这样来看,转子其实自带磁场,而不像异步电机是靠感应电流产生的磁场。 永磁铁有两种安装方法: 1是表贴式,也就是图中样式,永磁铁是贴在表面的; 2是內嵌式,需要在转子上打孔,将永磁材料填充进去; 表贴式:具有结构相对比较简单、制造成本较低、转动惯量小等优点; 内嵌式:如果转速够快,例如1wr/min甚至3wr/min,还是用内嵌式较好; 转子冲片机械强度高、安装永磁体后转子不易变形等。 以常见的感应式电机三相异步电机作比较: 其转子是鼠笼式的;在给定子通入交流电,定子中就会产生旋转磁场,旋转磁场在旋转时会切割笼条,从而
基础知识与市场详解 /
及其控制 (寇宝泉,程树康编著)
嵌入式工程师AI挑战营(初阶):基于RV1106,动手部署手写数字识别落地
有奖直播 瑞萨新一代视觉 AI MPU 处理器 RZ/V2H:高算力、低功耗、实时控制
消息称三星电子在硅谷开设先进处理器实验室,聚焦 RISC-V IP 开发
4 月 19 日消息,据韩媒 Sedaily 报道,三星电子通过旗下三星综合研究院(SAIT,Samsung Advanced Institute of Technology)在美 ...
一、定义与作用视频拼接控制器也称视频处理器,在液晶拼接屏中起了重要的作用,它是大屏拼接系统中的核心设备,但正如主机需要CPU一样,液晶 ...
100W音频功率放大器由运算功率放大器集成电路LM12CLK供电。该单片IC可以向 4Ω 负载提供 80W 正弦波功率,失线%。功率带宽为 ...
构建放大器简单,使用标准且稳定可靠。这里介绍的 75 W 放大器电路能够驱动 4 欧姆,但是,尽管用于 4 欧姆,该放大器的误差非常小 ...
这是一款8Ω负载下的12W小型功率放大器,将NE5534集成技术与晶体管作为V-MOSFET输出级相结合,获得出色的音质。输入灵敏度最大为 3Vrms,1 ...

站点相关:嵌入式处理器嵌入式操作系统开发相关FPGA/DSP总线与接口数据处理消费电子工业电子汽车电子其他技术存储技术综合资讯论坛电子百科
新闻中心
![]()
Copyright © 2013-2014 米乐m6体育官网app下载安装 浙ICP备2021001089号-1 ,主营:乳化泵、高剪切乳化机、减速机支架、乳化罐、釜底乳化机 版权所有网站地图
联系人:佘经理
电 话:0577-86810550
传 真:0577-86814050
手 机:15158693139
Q Q:669453420
友情网站: 米乐m6体育官网 米乐m6下载安装 m6米乐app官网下载